
DYANA THE DYNAMIC ANIMATRONIC ROBOT
Rethinking robotics
Abstract
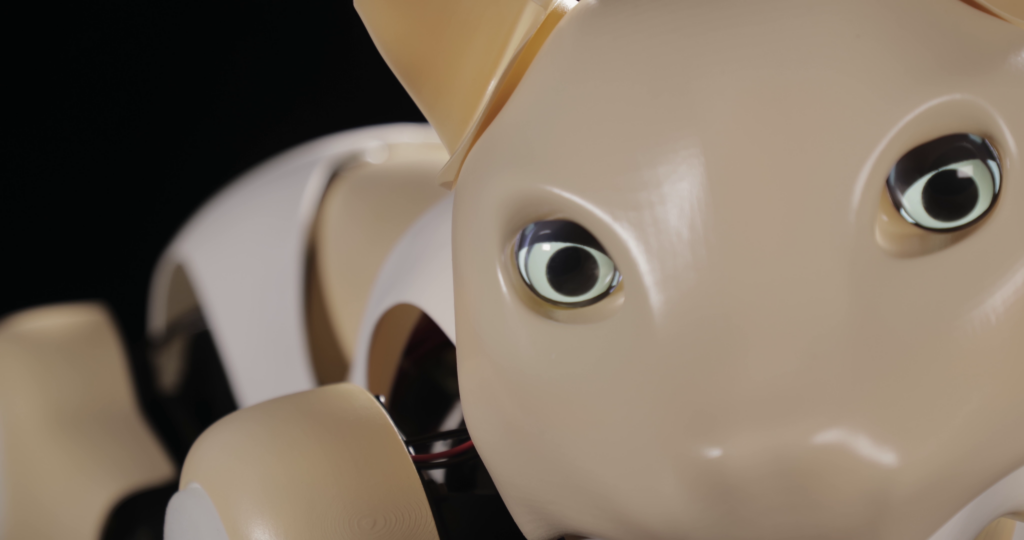
Dyana is a robot that mimics the movement and body language of a digitally drawn animation in the „real“ world, bridging the gap between the virtual and physical world. Visually inspired by the wild cat lynx, Dyana possesses its proportions, has movable ears, a tail, and four legs. The legs are what technically distinguishes Dyana from other quadrupeds (four-legged robots): The two hind legs have one more joint than the front legs, as is common in wild cats. This is a technical challenge that we faced as a team consisting of students from ETH Zurich, ZHdK, ZHAW, and FHNW. Our final results have been presented on the 1st of June 2021.



Process
We build a shell that enables easy access to all technical parts while covering what needs to be protected. Most parts are 3D printed, innovative in this field! Our main challenges were to design and control a walking robot and build a quadruped platform with a tail and head. Dyana should stand out from conventional four-legged robots of the same size by appearing friendly and accessible. She is designed with the character and aesthetics of a lynx in mind, the last big cat in Europe radiates elegance and self-confidence and has a playful, lively character.


My working tools include
- Hand drawings on paper and in Autodesk SketchBook Pro
- CAD-Modelling
- Virtual Sketching with the design and modeling software Gravity Sketch
- 3D-Prototyping hand-crafted and with 3D Printers
- Graphic Design in Adobe InDesign (Brochure)
- Time tabling and planing
- Teamwork
Being part of the industrial design team, I deal with the mechanical hardware and combine it with what is ultimately perceived as the surface and character of the robot.

Being involved from the beginning, we discussed the implementation and proportions of the mechanic parts and
analyzed our possibilities
after a «wild» individual ideation session we started combining our ideas 
and adapt those ideas by referring to our mood board 
once set some structures we opened up again with «wild» draftings in VR 
we thought about making the stiff back optically moving 
and about adding flexible feet to underline our robots felineity 
we regularly present our ideas and checked implementation possibilities 
once the shapes where set we went clean drawing in VR and made the final integration together with the engineers in Rhino.
About the project
Numerous four-legged robots have already been developed focusing on stability, function, and autonomous navigation. The design of these robots, however, is not appealing nor are they in any way relatable to a real-life creature.
In the past few years, Computer Generated Imagery has improved immensely, taking the spectator into a virtual world of limitless imagination. Tools to improve simulations and animations enhance the virtual world.
If you take robotics and bring it together with animation you end up with animatronics! Animatronics are aesthetically appealing and resemble living creatures.
Our project aims at combining the expertise in robotics and animation by building a mobile animatronic that can move dynamically while focusing on fluid movements and an aesthetic design.
